MPU6050 3 Eksen Eğim Ölçümü Alma - Z Ekseni İle Kumpas Ölçümü Dahil
Öncelikle yaptığımız işlem MPU6050 sensörü ile X,Y,Z eksenlerinin ölçümünü sağlamak. Sensör ile Gyro ve Açı ölçümü yapmak mümkündür.
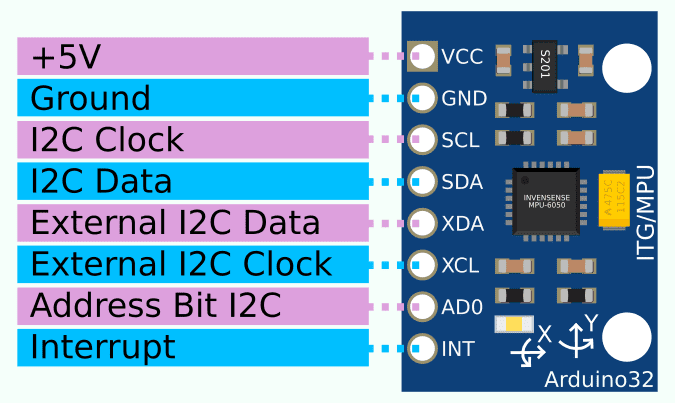
Pin bağlantısı şu şekilde;
- VCC -> Arduino üzerinde 5V'a bağlıyoruz,
- GND -> Arduino üzerinde GND pinine bağlıyoruz,
- SCL -> Arduino üzerinde SCL veya A4 pinine bağlıyoruz,
- SDA -> Arduino üzerinde SDA veya A5 pinine bağlıyoruz.
Daha sonra kütüphane ekleme kısmına geliyoruz;
MPU6050 Kütüphane dosyamızı buradan indirelim. İndirdiğimiz dosyayı açın ve içindeki klasörü Bilgisayarım->Belgelerim->Arduino->Libraries klasörüne çıkartın.
Kullanım şekli;
#include "Wire.h"
#include <MPU6050_light.h>
MPU6050 mpu(Wire);
void setup() {
Serial.begin(9600);
Wire.begin();
byte status = mpu.begin();
Serial.print(F("MPU6050 durumu: "));
Serial.println(status);
while (status != 0) { } // stop everything if could not connect to MPU6050
Serial.println(F("Kalibrasyon yapılıyor. Lütfen cihazı hareket ettirmeyiniz!"));
delay(1000);
mpu.calcOffsets(); // gyro ve açı sensörünün offsetlerini tanımlayalım.
Serial.println("Kalibrasyon tamamlandı!\n");
}
void loop() {
mpu.update();
Serial.print("");
Serial.print(mpu.getAngleX());
Serial.print(" ");
Serial.print(mpu.getAngleY());
Serial.print(" ");
Serial.println(mpu.getAngleZ());
}Burada kullanım şeklinde
mpu.getAngleX();mpu.getAngleY()mpu.getAngleZ()değerleri eksenleri temsil etmektedir. Z Ekseni kumpasta üzerine eklene eklene devam etmektedir. Yani 360 dereceyi geçince 0 derece yerine 361, 362 derece diye devam etmektedir. Bu kısmı aşmak için aşşağıdaki hazırladığım yazılıma göz atabilirsiniz;
#include "Wire.h"
#include <MPU6050_light.h>
MPU6050 mpu(Wire);
void setup() {
Serial.begin(9600);
Wire.begin();
byte status = mpu.begin();
Serial.print(F("MPU6050 durumu: "));
Serial.println(status);
while (status != 0) { } // stop everything if could not connect to MPU6050
Serial.println(F("Kalibrasyon yapılıyor. Lütfen cihazı hareket ettirmeyiniz!"));
delay(1000);
mpu.calcOffsets(); // gyro ve açı sensörünün offsetlerini tanımlayalım.
Serial.println("Kalibrasyon tamamlandı!\n");
}
void loop() {
mpu.update();
int bolum = (mpu.getAngleZ() / 360);
if(bolum-bolum_birikim == 1 && (bolum_birikim > 0 || bolum_birikim == 0)) bolum_birikim = bolum;
if(bolum-bolum_birikim == -1 && (bolum_birikim < 0 || bolum_birikim == 0)) bolum_birikim = bolum;
if(bolum_birikim-bolum == 2) bolum_birikim = bolum_birikim-1;
if(bolum_birikim-bolum == -2) bolum_birikim = bolum_birikim+1;
if(bolum_birikim == -1 && mpu.getAngleZ() > 0) bolum_birikim = 0;
if(bolum_birikim == 1 && mpu.getAngleZ() < 0) bolum_birikim = 0;
mpu.getAngleZ() = mpu.getAngleZ() - (bolum_birikim * 360);
Serial.print(mpu.getAngleX());
Serial.print(" ");
Serial.print(mpu.getAngleY());
Serial.print(" ");
Serial.println(mpu.getAngleZ());
}### NOT: Bu ölçüm paraziti en aza indirilmiş gyroscope değeri de göz önüne alınarak hesaplanan net eğim değerlerini vermektedir.
Burada kullandığımız
mpu.getAngleZ()değişkende "getAngleZ()" kütüphaneden alınan eksen fonksiyonudur. Buna benzer kullanabileceğiniz fonksiyonlar;getGyroXoffset()
getGyroYoffset()
getGyroZoffset()
getAccXoffset()
getAccYoffset()
getAccZoffset()
getFilterGyroCoef()
getFilterAccCoef()
getTemp()
getAccX()
getAccY()
getAccZ()
getGyroX()
getGyroY()
getGyroZ()
getAccAngleX()
getAccAngleY()
- Yazılımlarımız / Arduino
- 1 128




Makaleyle ilgili yorumlar makale sahibi tarafından devre dışı bırakıldı!
Bir hata mı buldunuz?
Bana bu konuda bilgi verebilirsiniz.
Hatalı kısımı mouse ile seç ve "CTRL+Enter" yapın
hatanın detayını yazarak bana gönderin.
Bana bu konuda bilgi verebilirsiniz.
Hatalı kısımı mouse ile seç ve "CTRL+Enter" yapın
hatanın detayını yazarak bana gönderin.
-
Yazılım
-
3D Tasarım
-
Grafik Tasarım
-
Video Edit
-
Diğer İçerikler
-
Ders Notları
İstatistik
File engine/modules/zpstats.php not found.
Blog (Yeni)
- Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
- Öncelikle bu hata discord’un kullanım şartlarına uymadığınız ve bir takım koyduğu topluluk kurallarını siz veya katıldığınız bir topluluğun ihlal
- File Extension İcon Pack - Dosya Uzantısı İkonları Paketi (Sayfamda kullandığım)
- Desteklediği dosya uzantıları;
- Font Awesome 4.5.0 Icon Set - Görselleriyle
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını kullanınız.
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını
Yorumlar
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
amınagoyim benim heasp boş ytre yedi 9 ayu içerde kaldıjm
Windows başlangıçta "explorer.exe" yerine başka program çalıştırma
Çok güzel bu şekilde yaparak okullardaki akıllı tahtaları açınca özel olarak yazdığım Dijital pano uygulaması devreye giriyor. Sorum şu Bu Dijital
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
Merhaba hesabım topluluk ilkeleri ihlal ettiğimi söylüyo devre dışı bırakıldı nasıl açtırabilirim
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
selam hesabım ne kadar devre dışı bırakıldı nasıl öğrenirim
Kartvizit Tasarım - Vektörel
merhaba kolay geslin teşekkürler
Video Trafiği
Etiketlere göre ara