MS5611-01b / Gy-63 Basınç Sensörü Arduino İle Kullanımı
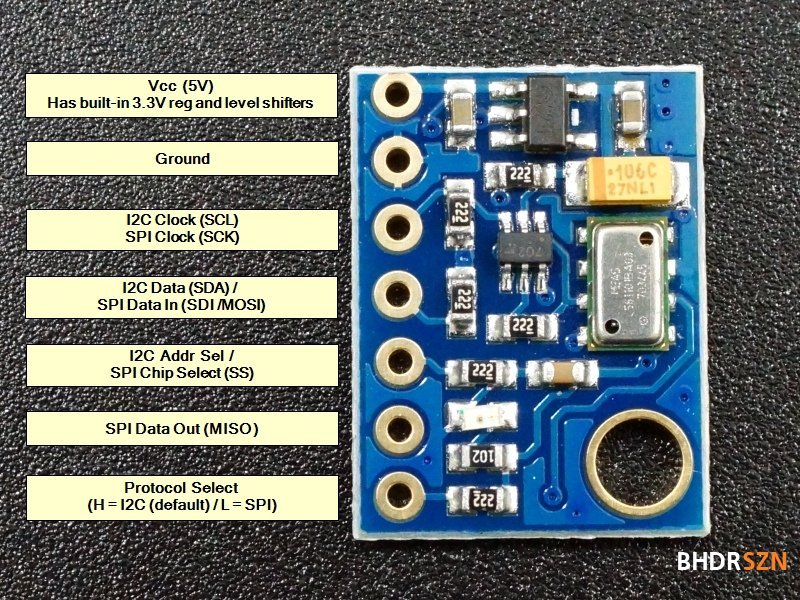
Bu modülümüz tek tarafı kapalı atmosferik basınç sensöründen oluşturulmaktadır. Metalık 2 delikli görülen sensör içerisinde kapalı bir diyafram arkasında 1atmosfer basınç değerinde sabit bir hava bulunmaktadır ve dış ortamdaki basınç değişimine göre tek yönlü basınç ölçümü yapmaktadır. Dış ortamda, günlük hayatta havanın yüksekliklerdeki basınç değerleri sürekli değişmektedir. örneğin bir masanın 10cm üstü ile 10 cm altındaki basınç farklıdır ve bu basınç aralıklarındaki sıcaklık ta basınca bir etkendir. Bu yazımda sıcaklık ile doğru orantılı hesaplama yapacak bir yazılımı sizinle paylaşacağım. Fakat modül üzerindeki sıcaklık sensörü seramik türde bir sensör olduğu için aşşağı yukarı sıcaklık dengelenene kadar basınç değişiklik gösterdiğini görebilirsiniz. Bunlara ek olarak da 25cm'lik sensörün hata payı mevcuttur.
Gelelim sensörün kütüphane dosyasına:
MS5611-GY63 Kütüphane dosyamızı buradan indirebiliriz. İndirdiğimiz dosyanın içerisindeki klasörü Bilgisayarım -> Belgeler -> Arduino -> Libraries klasörüne çıkartalım
Daha sonra Arduino IDE programını açarak aşşağıdaki kodu kullanabiliriz;
#include <MS5611.h>
#define MOVAVG_SIZE 32
MS5611 baro;
int32_t pressure; // Baskal olarak basınç değeri
const float sea_press = 101325; // Paskal olarak deniz seviyesi değeri
int32_t temperature;
float movavg_buff[MOVAVG_SIZE];
int movavg_i=0;
void setup() {
baro = MS5611();
baro.begin();
for(int i=0; i<MOVAVG_SIZE; i++) {
movavg_buff[i] = baro.getPressure();
}
Serial.begin(115200);
}
void loop() {
pressure = (baro.getPressure());
pushAvg(pressure);
pressure=getAvg(movavg_buff, MOVAVG_SIZE);
temperature = (baro.getTemperature());
Serial.println(getAltitude(pressure,temperature)); //Bu kısımda yükseklik değerini ekrana yazdırıyoruz. Seri çiziciyi açarak yükseklik grafik verisini görebiliriz.
}
float getAltitude(float press, float temp) {
return ((pow((sea_press / press), 1/5.257) - 1.0) * (temp*0.01 + 273.15)) / 0.0065;
}
void pushAvg(float val) {
movavg_buff[movavg_i] = val;
movavg_i = (movavg_i + 1) % MOVAVG_SIZE;
}
float getAvg(float * buff, int size) {
float sum = 0.0;
for(int i=0; i<size; i++) {
sum += buff[i];
}
return sum / size;
}
- Yazılımlarımız / Arduino
- 1 061

Makaleyle ilgili yorumlar makale sahibi tarafından devre dışı bırakıldı!
Bir hata mı buldunuz?
Bana bu konuda bilgi verebilirsiniz.
Hatalı kısımı mouse ile seç ve "CTRL+Enter" yapın
hatanın detayını yazarak bana gönderin.
Bana bu konuda bilgi verebilirsiniz.
Hatalı kısımı mouse ile seç ve "CTRL+Enter" yapın
hatanın detayını yazarak bana gönderin.
-
Yazılım
-
3D Tasarım
-
Grafik Tasarım
-
Video Edit
-
Diğer İçerikler
-
Ders Notları
İstatistik
File engine/modules/zpstats.php not found.
Blog (Yeni)
- Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
- Öncelikle bu hata discord’un kullanım şartlarına uymadığınız ve bir takım koyduğu topluluk kurallarını siz veya katıldığınız bir topluluğun ihlal
- File Extension İcon Pack - Dosya Uzantısı İkonları Paketi (Sayfamda kullandığım)
- Desteklediği dosya uzantıları;
- Font Awesome 4.5.0 Icon Set - Görselleriyle
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını kullanınız.
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını
Yorumlar
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
amınagoyim benim heasp boş ytre yedi 9 ayu içerde kaldıjm
Windows başlangıçta "explorer.exe" yerine başka program çalıştırma
Çok güzel bu şekilde yaparak okullardaki akıllı tahtaları açınca özel olarak yazdığım Dijital pano uygulaması devreye giriyor. Sorum şu Bu Dijital
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
Merhaba hesabım topluluk ilkeleri ihlal ettiğimi söylüyo devre dışı bırakıldı nasıl açtırabilirim
Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
selam hesabım ne kadar devre dışı bırakıldı nasıl öğrenirim
Kartvizit Tasarım - Vektörel
merhaba kolay geslin teşekkürler
Video Trafiği
Etiketlere göre ara