STM32 Cube IDE ile PWM Ayarlama ve Açısal Servo Motor Kontrolü
STM32 Üzerinde herkes gibi bende araştırarak kullanım aşamalarını öğreniyordum fakat öğrenirken kaynaklarda genelde "Prescaler" ve "Counter Period" değeri frekans bölümünün bölümü gibi değişik şekilde anlatılıyor. Bu yazımda olabildiğince sade şekilde pwm kullanımını anlatacağım.
Öncelikle aşşağıdaki görselde servo motorun "PWM" ile çalışma değerleri gösterilmiştir. Bu görseldekine benzer kullanacağınız cihazın PWM değerlerini bu şekilde hesaplayabilirsiniz. Bu yazımda duty olarak değer bahsetmeyeceğim burayı doluluk oranı diye bahsedeceğim çünkü STM32 Cube IDE üzerinde duty olarak değer geçmemekte.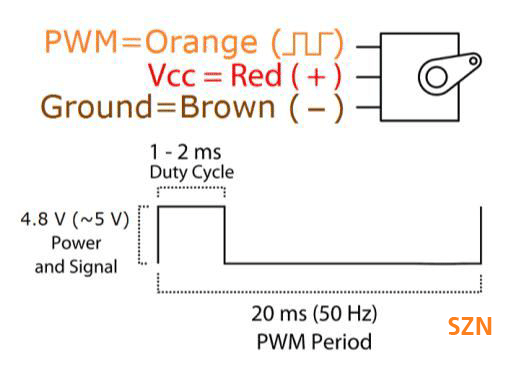
Bu görselde PWM period dediğimiz 1 pwm sinyalinin toplam uzunluğu yani 20ms sürede veriliyor ve 50hz frekansında çalışıyor.
Takip edilmesi gereken işlemler:
1-) STM32 Üzerinde SYS ve RCC'yi seçiyoruz RCC'yi "High Speec Clock" kısmında Crystal/Ceramic Resonator'ü seçiyoruz.
2-) Clock Configuration sekmesinden HCLK kısmını 50 yapıyoruz. Burada cihaz üzerinde timer kısmını ve diğer bölümleri 50Mhz de çalıştırıyoruz.
3-) Tekrar Pinout / Configuration kısmına giriyoruz. Burada "Timers" kısmını genişletiyoruz. Burada "TIM1"i seçiyoruz. Bu bölümde Clock Source'yi -> Internal Clock olarak seçiyoruz. Burada pwm için zamanlayıcı kaynağını belirtmiş olduk. Daha sonra alt kısmında 4 veya 6 adet STM32 kartınıza göre değişiklik gösterebilir Channel1-2-3-4 kaç tane istiyorsak hepsinin yanındaki dropdown'a tıklayarak PWM Generation CH1-2-3-4 kaç adet istiyorsak o kanalık ch değerini seçerek kullanılacak kanal değerini belirtiyoruz. Üst kısımda yapıacak işlemler bitiyor daha sonrasında alt kısımdaki "Parameter Settings" kısmına geçiyoruz.
- Buradaki işlem sırası şu şekilde:
- Öncelikle Counter Period kısmını ayarlıyoruz. Bu "Kullanacağınız cihazın frekansı * period(ms)" olarak hesaplanıyor. Burada Period kısmımız yukarıdaki servo pwm tablosunda görüldiği gibi 20ms ve çalışılan frekans 50 hz. Bu da 20*50 = 1000. Burada STM32 kartı pinlerinde genelde +1 değeri alındığı için Counter Period kısmına "1000-1" yazıyoruz.
- Daha sonrasında Prescaler değerini hesaplamamıza geldi bu işlem de şöyle cihazımızda osilatör frekansınız 50Mhz olarak belirlemiştik. Bu değeri Counter Period değerine bölüyoruz ve çıkan değeri de çalışma frekansımıza bölüyoruz çıkan sonuç bizim Prescaler değerine denk geliyor. Burada osilatör frekansını Hz olarak yapmamız gerekmektedir. 50.000.000(Hz) / 1000 / 50(Hz) = 1000 değeri bizim Prescaler değeridir. Burada da değeri "1000-1" şeklinde yazmamız gerekmektedir.

- Yazılımlarımız / STM32
- 1 572



Bana bu konuda bilgi verebilirsiniz.
Hatalı kısımı mouse ile seç ve "CTRL+Enter" yapın
hatanın detayını yazarak bana gönderin.
-
Yazılım
-
3D Tasarım
-
Grafik Tasarım
-
Video Edit
-
Diğer İçerikler
-
Ders Notları
- Discord “Hesabın devre dışı bırakıldı.” Uyarısı ve çözümü
- Öncelikle bu hata discord’un kullanım şartlarına uymadığınız ve bir takım koyduğu topluluk kurallarını siz veya katıldığınız bir topluluğun ihlal
- File Extension İcon Pack - Dosya Uzantısı İkonları Paketi (Sayfamda kullandığım)
- Desteklediği dosya uzantıları;
- Font Awesome 4.5.0 Icon Set - Görselleriyle
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Autodesk AutoCAD Inventor Suit x64 v2011 İndirme Linki
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını kullanınız.
- Datalife Engine Uyarı, fazla parola girişi denemesi yapılmış. Hesap 20dk bloke edilmiştir. Eğer parolanızı kaybettiyseniz Şifremi Unuttum aracını